功能介绍
功能介绍
# 功能介绍
以下将主要介绍界面中各模块、字段代表的含义与功能。对于报表图表,还将介绍各图表表示的含义,以及计算的方法等信息。
# 1. PID基本资料
关于设备等数控中心的基础数据的设置请阅读数控数据。
# 2. PID趋势图
PID趋势图显示实时的PID控制信息,左侧显示当前实时的控制参数信息。用户可以自行设定其他的控制参数,右侧的控制数据信息也会同步更新。
以图中的示例进行说明,如果需要设置特定的参数值,需要自行修改设定值、Kp、Ki、Kd,点击 [设定] 后可以更新参数。
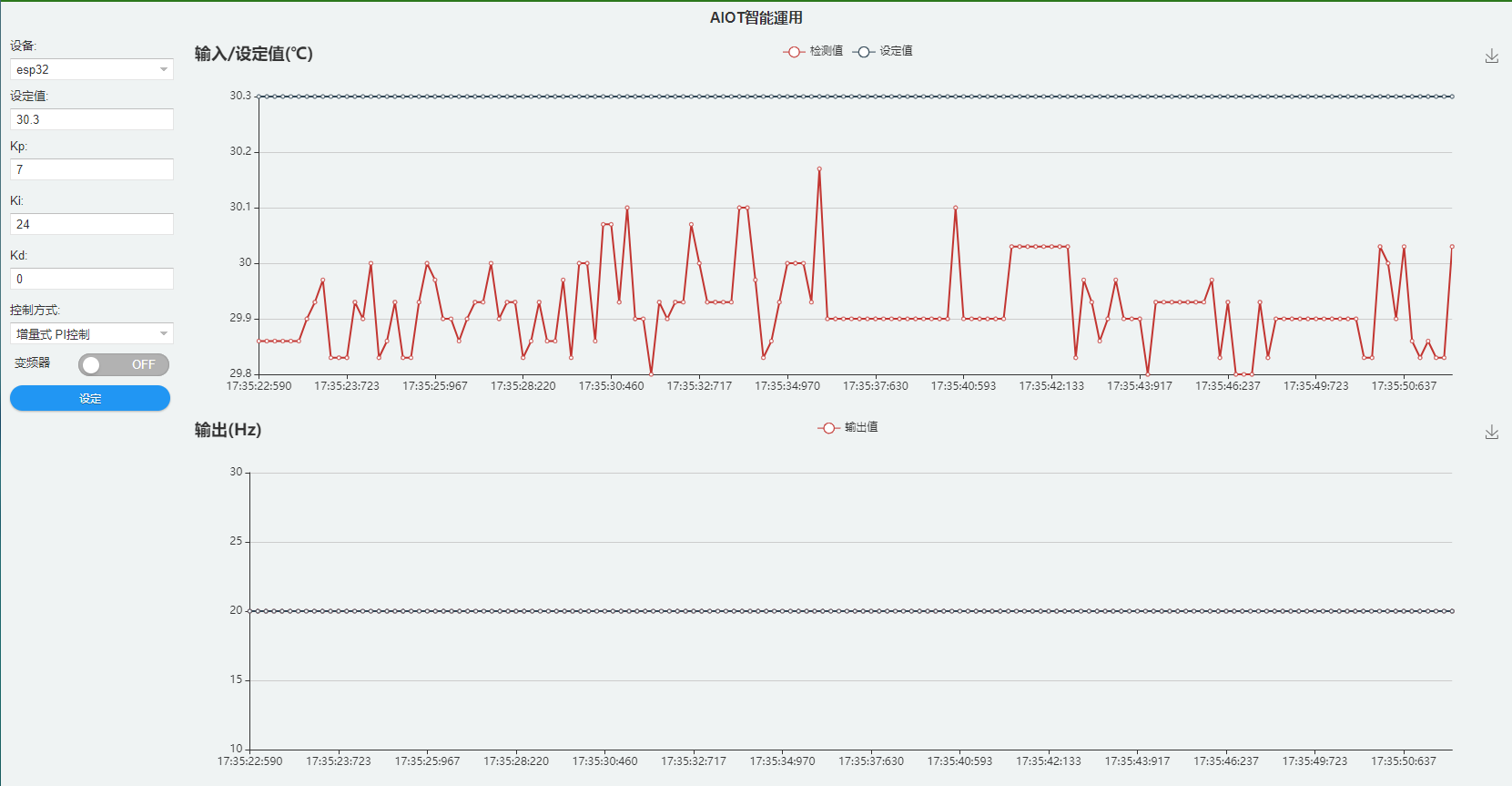
图中显示有两种控制方式,以下针对两种控制方式分别作说明。
位置式PID控制:控制器的输出是系统的当前状态与期望状态之间的差值(误差)。这意味着控制器的输出直接控制系统的位置、角度、温度等物理量,而不是速度或增量。位置式PID控制器是最常见的PID控制形式,适用于大多数应用,尤其是对于需要直接控制物理过程的情况。
增量式PID控制:控制器的输出是系统当前时刻的控制变量与上一个时刻的控制变量之间的差值,而不是直接控制系统的位置或状态。因此,输出是一个增量值,通常用于调整系统的控制变量(如阀门开度或电机的速度增量)。增量式PID控制器对于一些特殊应用具有优势,特别是需要避免积分分离问题(Integral Windup)的情况。积分分离是指积分项累积过多误差,导致系统的超调或不稳定。
选择位置式PID控制器或增量式PID控制器取决于具体的应用和系统需求。位置式PID控制器通常更常见,而增量式PID控制器在某些情况下可能更有用,特别是在需要避免积分分离问题或者需要对增量进行更精确控制的情况。
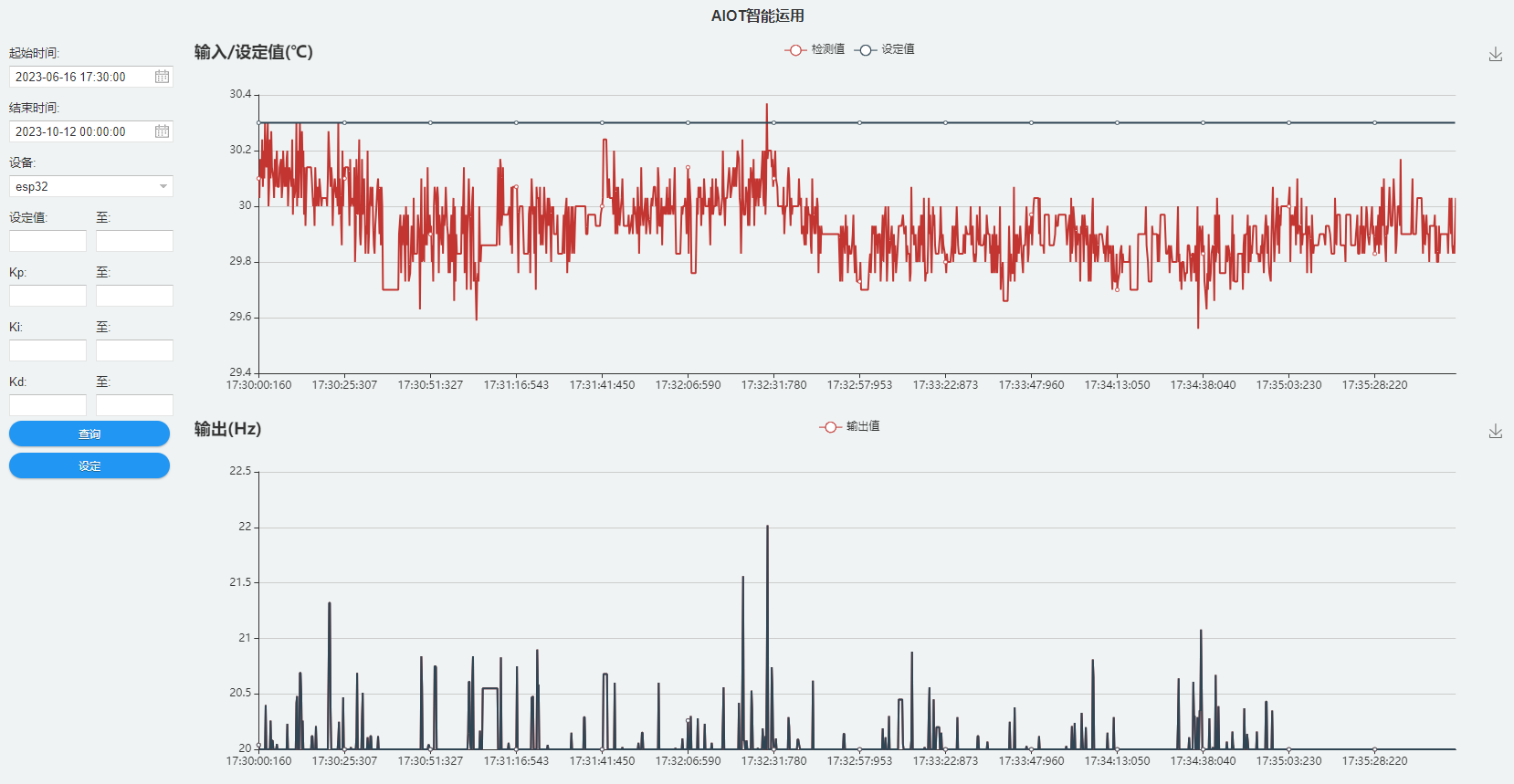
# 3. PID历史记录
PID历史记录用于查询过去PID控制器的历史控制记录,可自行选择特定的参数值与设定值查询PID控制器的输入、输出情况。
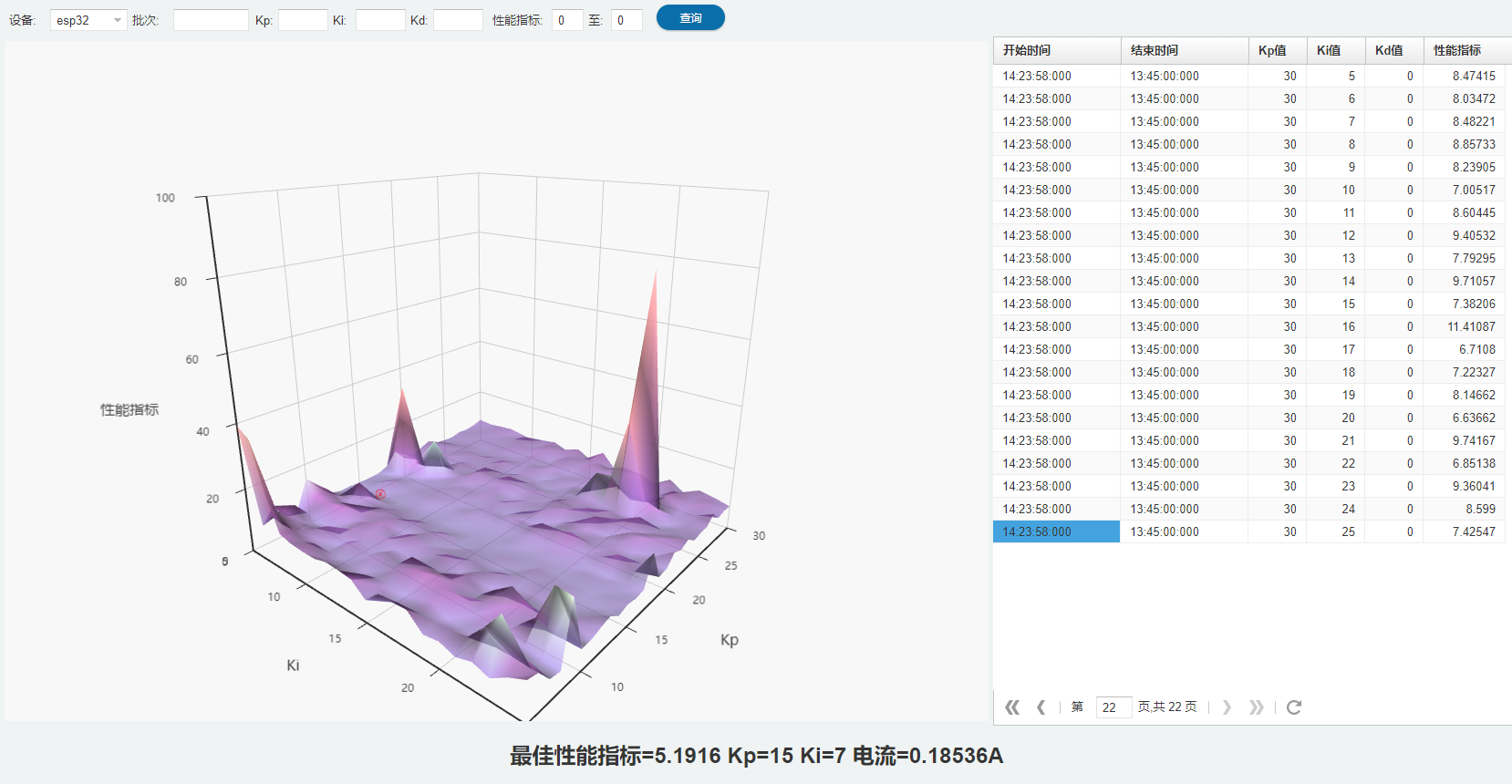
# 4. 性能指标分析
性能指标是一个与设备的电流、控制值与实际值的误差正相关的数据,它应当是一个大于0的数据,用来表示PID控制器的稳定性与节能程度的指标。当性能指标数据越小时,表示当前运行状态下设备更节能,PID控制器更稳定。图中使用红点标注了性能指标最小值所在的位置。
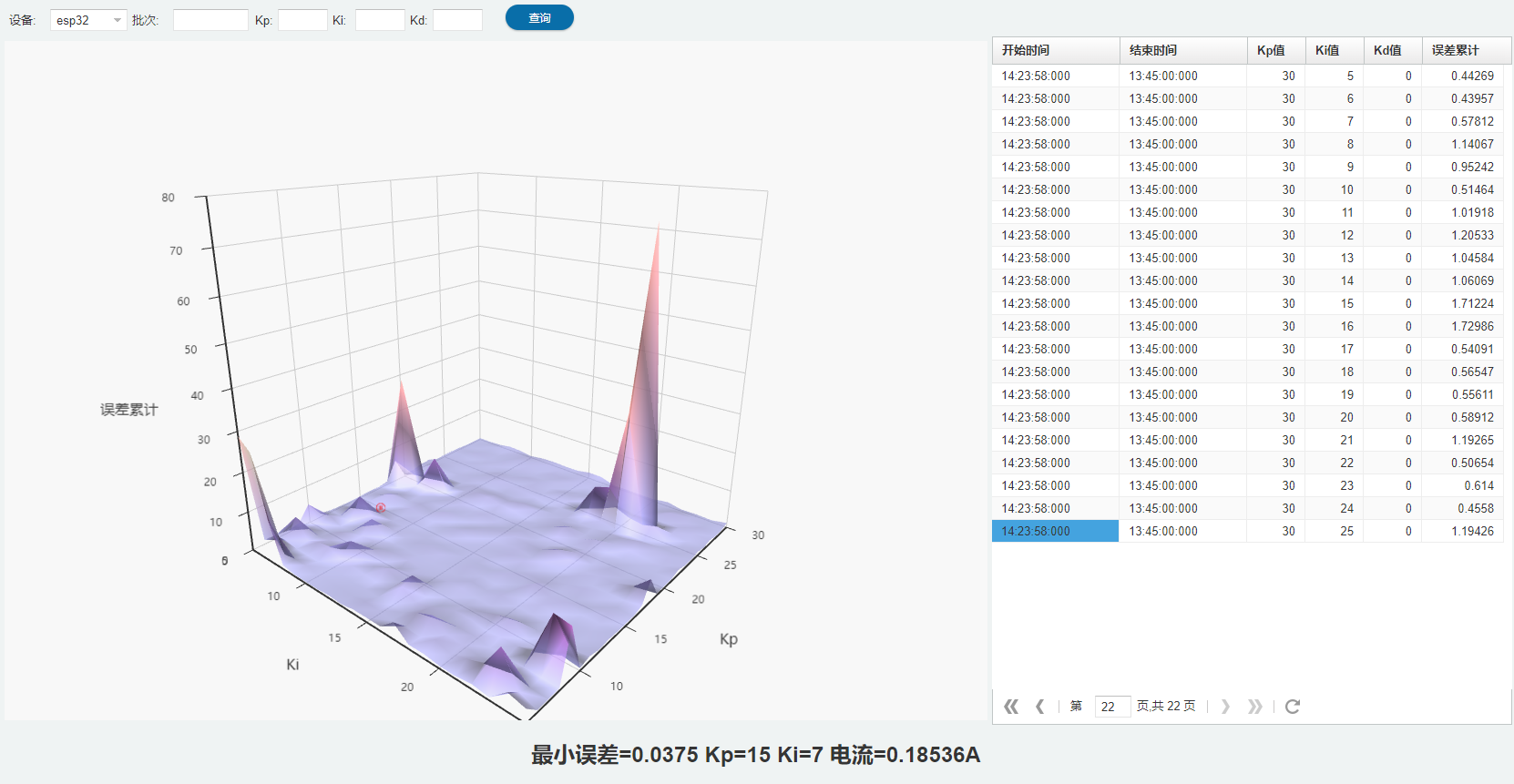
# 5. 误差分析
误差分析与 性能指标分析 相比,去除了设备电流部分的数据,仅关注误差的部分。它应当是一个大于0的数据,用来表示PID控制器的稳定性。当性能指标数据越小时,表示当前运行状态下PID控制器更稳定。图中使用红点标注了误差最小值所在的位置。
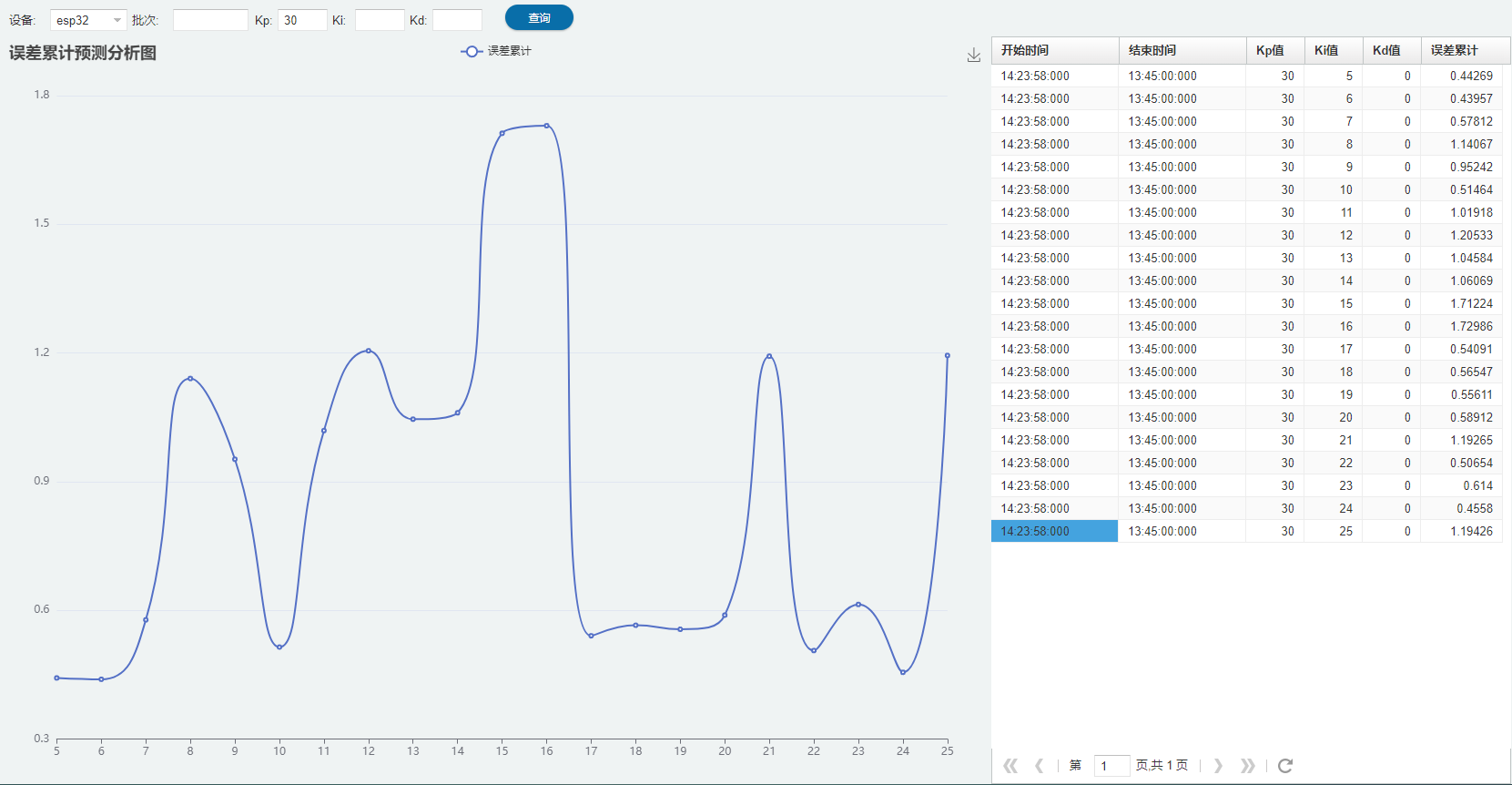
# 6. 误差累计预测分析
误差累计预测分析图是将参数取值的变量控制到1个,观察这个变量与误差累计之间的变化关系。这种观察方式将三维图形平面化处理,能更精细化观察趋势。如果图中发现误差累计数据随着观察变量的增加出现了先减少后怎加的情况,说明在中间的某个取值能让误差做到相对较小,在这个取值范围内的PID控制器能做到相对的稳定,这是采用人工分析的方法实现的。
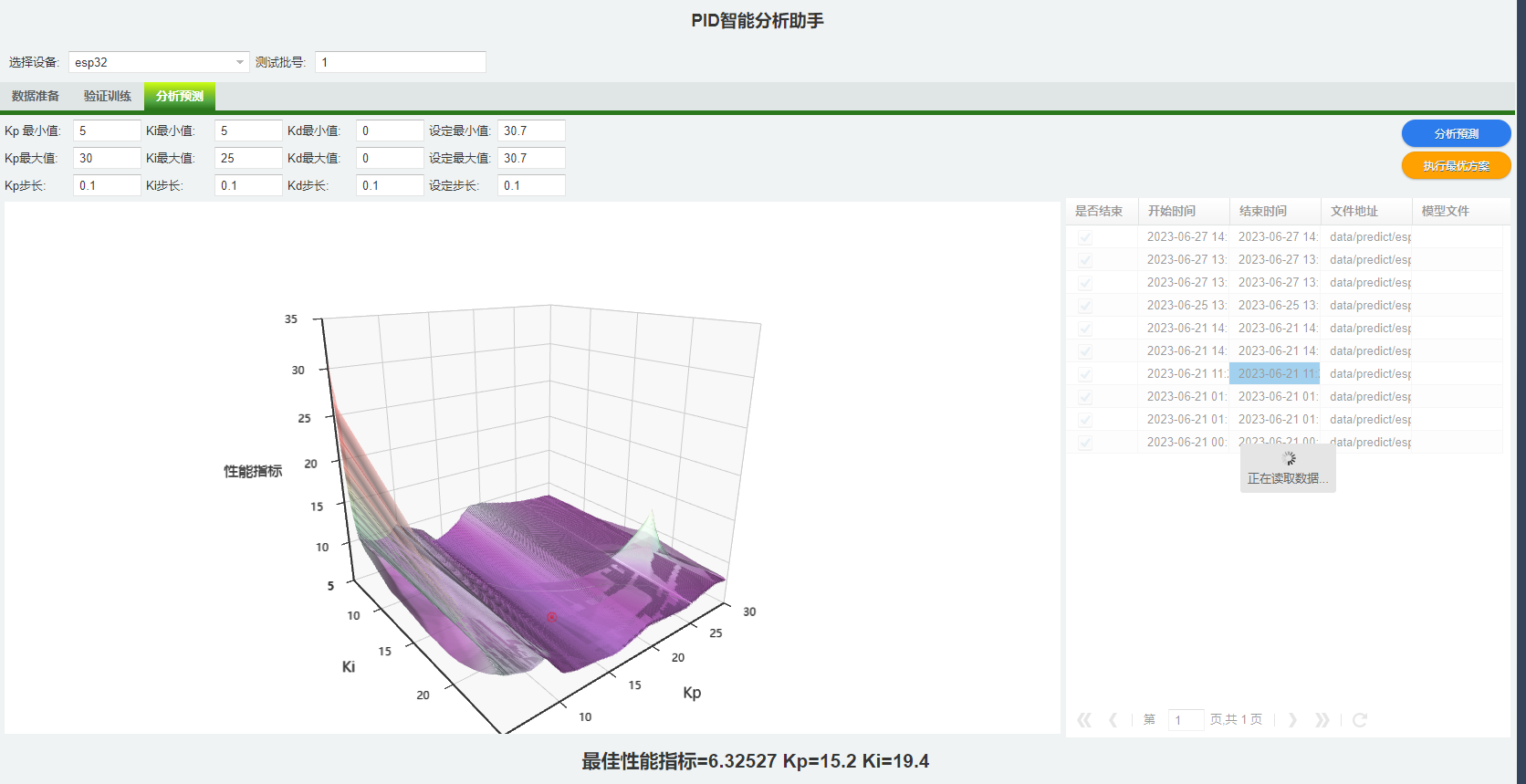
# 7. PID智能分析助手
PID智能分析助手是模型训练向导,用来指导训练生成最佳效益分析模型的模块。
在数据准备环节,界面中会显示所有符合要求的数据,可以自行设置置信度与性能权重。置信度反映的是生成的性能指标在统计范围中位数区间的偏离程度,超过这个偏离程度的数据会被视为无效数据舍弃。性能权重用来平衡电流指标与误差指标。如果在实际运用中更注重节能,则性能权重应当设置小于1的数值;如果更注重PID控制器的稳定性,则设置性能权重应当大于1,根据重视程序调整,如果特别重视误差的话,则应调整性能权重至少大于100。调整完成后,点击 [更新整定标准数据]。这些选择的数据会被更新新的性能指标数据。

在验证训练环节。可自行调整模型训练的参数信息。可修改训练的参数,点击 [更新预测模型] 开始执行模型训练,训练完成后,可看到训练的记录,同时加载新的模型。
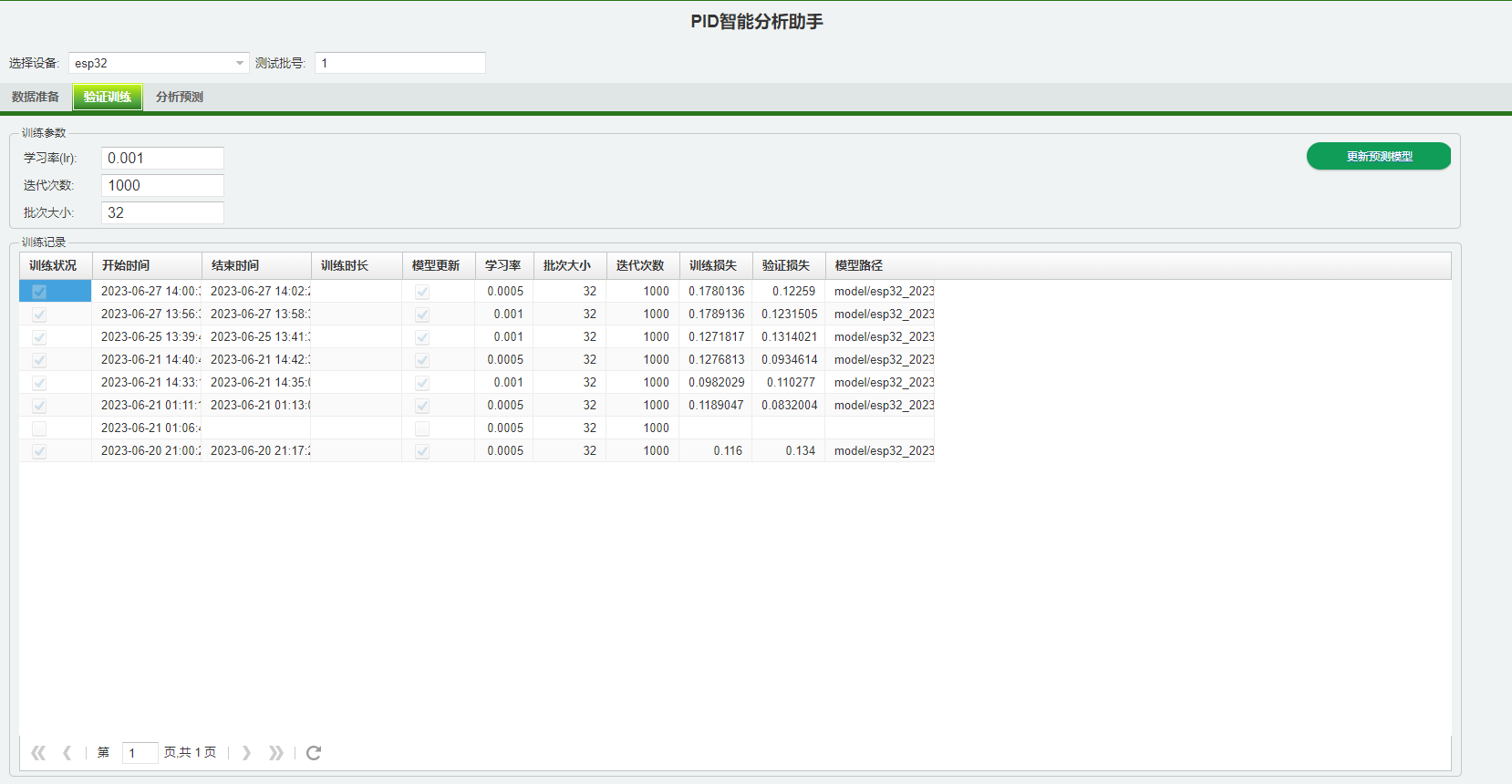
表中的字段说明如下:
- 训练状况:是否训练完成。
- 模型路径:训练完成的模型所在的路径。
- 开始时间:训练模型的起始时间。
- 结束时间:训练模型的结束时间。
- 模型更新:是否生成了新的模型。
- 学习率:模型训练时,更新模型参数的梯度数值。
- 批次大小:训练的数据批次的数量。
- 迭代次数:训练完整批次数据的次数。
- 训练损失:训练完成的模型验证训练集(用于模型训练的数据集)的结果的均方差值。用于反映模型预测结果与实际结果的偏差值,这个数值应越小越好。
- 验证损失:训练完成的模型验证验证数据集(未参与模型训练的数据集)结果的均方差值。用于反映模型预测结果与实际结果的偏差值,这个数值越小越好。
在分析预测环节,可自行指定模型要预测的参数区间范围,点击 [分析预测],模型会根据选定的范围进行性能指标的预测分析,并以三维图表的方式展示这些预测的结果。同时图表中会标注性能指标最小值所在的位置,底部会同时显示最佳性能指标对应的参数,可将这套参数运用至当前运行的设备上。